信息物理系統集成的魯棒模型預測控制架構研究
隨著工業4.0和智能制造的深入推進,信息物理系統作為連接物理世界與信息空間的核心概念,其集成與控制問題日益受到學術界與工業界的關注。CPS集成了計算、通信與控制能力,旨在實現對物理過程的高效、可靠與智能化的監控與管理。在這一背景下,將魯棒控制理論與模型預測控制技術相結合,并應用于計算機信息系統集成的框架中,構建一種能夠應對系統不確定性、時延與外部干擾的先進控制架構,具有重要的理論價值與現實意義。
一、信息物理系統與信息系統集成的內涵
信息物理系統是一個綜合計算、網絡和物理過程的復雜系統,通過嵌入式計算機和網絡對物理過程進行監測與控制,實現信息世界與物理世界的深度融合與實時交互。而計算機信息系統集成,則是指將各類獨立的軟件、硬件、網絡及數據資源,通過技術手段有機地組合成一個協調統一、高效運行的整體系統,以滿足特定的業務功能與性能需求。將CPS的理念融入信息系統集成,意味著構建的系統不僅關注信息流的高效處理與傳遞,更強調對底層物理設備的精確感知、智能決策與實時閉環控制,從而實現從感知到決策再到執行的縱向貫通。
二、魯棒模型預測控制的理論優勢
模型預測控制是一種基于模型、滾動優化與反饋校正的先進控制算法,特別適用于處理多變量、有約束的復雜過程控制問題。其核心在于利用當前時刻的系統狀態與預測模型,在線求解一個有限時域的最優控制問題,并將解序列的第一個元素應用于被控對象。傳統的MPC對模型失配和外部擾動較為敏感。魯棒MPC通過將系統的不確定性(如參數攝動、未建模動態)或干擾 explicitly 考慮進優化問題中,設計能夠保證在所有可能的不確定性實現下均滿足約束并保持某種性能指標的控制器。這種對不確定性的主動包容性,使其非常適合于CPS這類常面臨網絡時延、數據丟包、模型不精確等挑戰的動態環境。
三、面向CPS集成的魯棒MPC架構設計
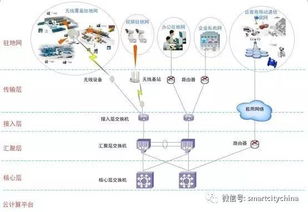
構建一個適用于CPS集成的魯棒MPC架構,需要從系統整體視角出發,設計分層、分布式的控制與通信框架。該架構通常包含以下幾個關鍵層次:
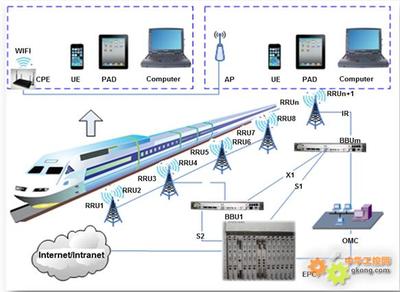
- 物理感知與執行層:由傳感器、執行器及各類物理設備構成,負責采集物理世界的狀態信息(如溫度、壓力、位置),并執行控制層下發的指令。該層通過現場總線或工業以太網與上層連接,是CPS的“觸手”。
- 邊緣計算與局部控制層:在靠近物理設備的網絡邊緣部署具備一定計算能力的節點(如工業網關、邊緣服務器)。部分魯棒MPC算法可部署于此,實現對局部子系統的快速、低時延的閉環控制。該層負責處理實時性要求高的控制任務,并向上層傳遞聚合后的狀態與事件信息。
- 網絡通信層:作為連接各層的信息高速公路,需采用可靠、有時序保障的通信協議(如TSN、5G URLLC)。魯棒MPC設計必須顯式考慮該層引入的通信時延、數據異步及丟包等不確定性問題,通常采用時延系統模型或隨機模型將其納入控制器設計中。
- 云端協同與優化層:在云端或企業級服務器上,運行更復雜的全局優化與協調算法。此層可基于從各邊緣節點上傳的海量數據,利用更精確的宏觀模型,進行生產調度、能效優化、預測性維護等高級應用,并為下層的局部魯棒MPC控制器設定或更新參考軌跡、性能指標及約束條件,實現全局意義上的動態優化。
- 信息集成與管理平臺:這是一個橫向貫穿各層的軟件平臺,負責系統的配置管理、數據融合、人機交互、安全監控與運維。它將控制功能、IT系統(如MES、ERP)以及各類信息服務集成在一個統一的框架下,確保信息流與控制流的無縫對接與安全可靠。
在該架構中,魯棒MPC充當了“智能控制引擎”的角色。它運行在邊緣層和/或云端,其預測模型集成了被控對象的物理動力學與信息網絡特性(如時延模型),優化目標則兼顧了控制性能(如跟蹤精度、能耗)與系統的魯棒穩定性。通過滾動優化,它能夠實時響應系統狀態變化與上層指令調整;通過魯棒設計,它能確保在模型不確定性及有限網絡資源下,系統依然滿足所有安全與操作約束。
四、挑戰與未來展望
盡管基于魯棒MPC的CPS集成架構前景廣闊,但仍面臨諸多挑戰:一是復雜系統的高保真建模與不確定性量化困難;二是大規模分布式系統中魯棒MPC的在線計算復雜度高,對實時性構成壓力;三是信息空間的安全(如網絡攻擊)與物理空間的安全(如設備故障)相互交織,需要研究具有安全彈性的控制方法。
未來研究方向可能包括:開發計算效率更高的分布式魯棒MPC算法;探索與人工智能(如深度學習)相結合,利用數據增強模型的預測能力與不確定性描述;深入研究信息-物理跨域安全協同防御機制;推動相關標準與中間件的制定,以促進該架構在工業互聯網等領域的落地應用。
結論
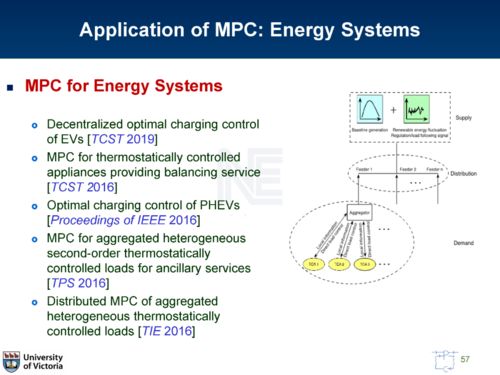
將魯棒模型預測控制融入信息物理系統的集成框架,為構建高性能、高可靠、自適應強的智能化系統提供了一條有效的技術途徑。這種架構深度融合了控制理論、計算機科學與信息技術,通過分層設計、協同優化,能夠有效駕馭CPS內在的復雜性、不確定性與網絡化特性。隨著關鍵技術的不斷突破,此類架構必將在智能制造、智慧能源、智能交通等領域發揮越來越重要的作用,推動工業生產與社會運行向更高水平的自主智能演進。
如若轉載,請注明出處:http://www.lywedu.cn/product/42.html
更新時間:2026-01-07 01:16:16